Simulating a Drone’s Self Localization with A Particle FilterA Particle filter is a localization algorithm based on sampling random points and calculating the probability that your points represent…Jun 17, 2021Jun 17, 2021
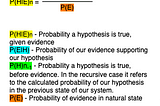
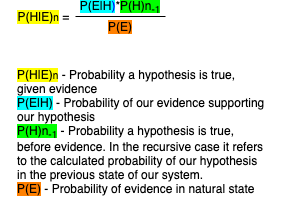
Identifying System Malfunctions Using Bayes TheoremAn Intro to Probabilistic RoboticsFeb 23, 2021Feb 23, 2021
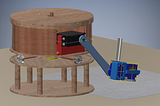
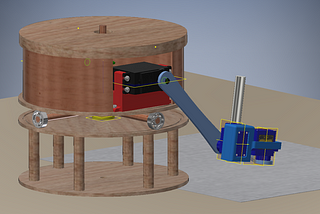
Published inAnalytics VidhyaCreating My Own Inverse Kinematics Equations For Our Robotic Arm, Using Simple TrigonometryA few months ago, I was working on a project to create a robotic arm using my Raspberry Pi 0 and cheap servos. After a lively virtual…Feb 2, 2021Feb 2, 2021